What are the filter settings in Trackab?
TrackLab version 2.13 contains three different filter settings
TrackLab 2.13 contains three filter settings:
- Sample rate
- Smoothing window size
- Minimum distance moved threshold (MDM)
Sample rate
This setting specifies the maximum number of data points recorded by TrackLab per second, per tag. If a tag produces more than ‘sample rate’ data points, TrackLab filters out the surplus.
Depending on the configuration of the Sewio system, it can acquire data points with high frequency. This is desired when you are interested in additional sensor data like accelerometer data. In this case, the sample rate filter in TrackLab will limit the amount of location sample data entering TrackLab. The other sensor data (e.g., accelerometer) will remain at the sample rate set for the tags.
For cattle, we usually set the sample rate to 1Hz. Higher sample rates put a bigger load on TrackLab’s database and processing while the analysis results do not improve.
In general, tracking smaller subjects requires a higher sample rate.
Smoothing window size
To smooth out short-term fluctuations in the coordinates due to noise and rapid movements of the subject, TrackLab re-calculates the position of the tag based on the average coordinates of the data points in an interval around the focal time. This interval is called smoothing window (see below).
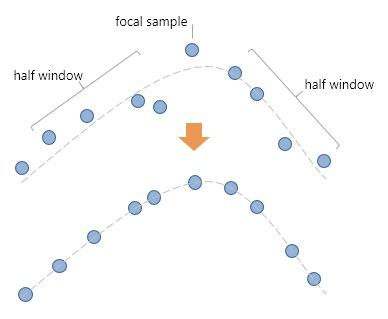
For example, if the window size is 25 samples, the position of the tag at sample time (t) is calculated as the average of the coordinates of 25 samples centered on the focal sample. Those 25 samples consist of the focal sample, the last 12 samples before t, and the next 12 samples after t.
This averaging process smooths out zig-zag paths. The higher the window size value, the smoother the resulting track will be.
NOTE: By default, smoothing is enabled with a window size of 9.
Minimum distance moved (MDM) threshold
This setting filters out raw data which contains minimal displacement between subsequent locations. It removes noise and creates a more realistic estimate of the total distance moved by the subject, particularly when the subject spends significant time sitting or laying.
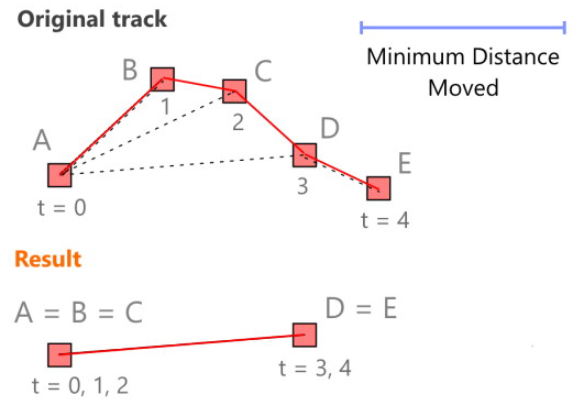
To remove small, random displacements caused by noise in the data, TrackLab calculates first the distance between a sample and the next (AB in the following figure). If the distance is shorter than the threshold distance, the second sample (in the example below, B) is “moved” to the previous (A).
Then TrackLab calculates the distance from A to the second next sample (the dotted line AC), etc. until it finds a segment (AD) longer than the threshold distance. Sample D is then kept in the original position. In this example, samples B and C are both set to sample A. TrackLab proceeds with the next segment (DE) etc. up to the end of the track. As a result, the track only shows significant displacements. Very small movements, which in the case of a stationary animal may consist entirely of noise, are filtered out.
- A low value of the Minimum Distance Moved threshold does not have a significant effect on the track, especially at high sample rates (e.g. 10 samples/s).
- Select a low value of Minimum Distance Moved threshold in the following cases: (a) when the tracking area is small; (b) when you defined small Areas of Interest; (c) when you analyze proximity with a small value of the ‘In proximity below’ threshold. The value of Minimum Distance Moved should be smaller than the proximity threshold.
In combination with Sewio, we advise using a MDM threshold of 0.30 m.
In combination with GPS Lora, we advise using a MDM threshold of 1.00m.